









“Inteligencia Artificial y prospectiva del ejercicio profesional”
Detección de Anomalías en la Operación de Pick-and-Place de un Robot Colaborativo
Hernán David Moreno Rueda
Egresado del pregrado de Ingeniería Mecatrónica y estudiante de la maestría en Engineering Technology de la Universidad de Purdue
Los robots han sido introducidos en la industria para reemplazar cualquier acción humana que sea repetitiva y en la que estos puedan presentar un mayor desempeño, o que a largo plazo pueda causar fatiga al operario. En algunos procesos industriales existen tareas que requieren tanto de la destreza humana como de las ventajas que ofrecen los robots, por esto se han introducido en el mercado los robots colaborativos o cobots. Estos son capaces de colaborar con los humanos dentro de la misma celda de trabajo, ya que se detienen al colisionar con un operario (Chen et al., 2020).
Dentro de algunas de las aplicaciones en que se ven involucrados los cobots se encuentra la cadena de embalaje de insumos en cajas. Esta tarea asignada al robot puede presentar algunas anomalías que influyen en su productividad ya que, por ejemplo, puede soltar la pieza y perder un ciclo de operación (Czubenko & Kowalczuk, 2021).
Gracias a las tecnologías de inteligencia artificial que buscan brindar un mayor nivel de autonomía a las máquinas y dispositivos, es posible implementar modelos de machine learning para detectar estas anomalías y hacer seguimiento sobre la productividad del cobot (Park et al., 2021).
El presente trabajo fue llevado a cabo en el Indiana Manufacturing Center, en Estados Unidos, y busca implementar un modelo de machine learning que permita la detección de anomalías en el peso levantado por un cobot, que será utilizado en el embalaje de botellas plásticas para el envase de medicamentos. Para ello, se han considerado tres casos:
Peso Normal
El peso de tres envases plásticos.
Menor Peso
El peso soportado por el robot es menor al esperado, lo cual indica que el robot ha dejado caer alguno de los envases inesperadamente.
Sobrepeso
El robot soporta un peso mayor al esperado.
La Figura 1 muestra el montaje del cobot, donde una banda transporta las botellas plásticas y el robot las agarra usando un gripper para su posterior embalaje en cajas:
Figura 1
Cobot para embalaje de botellas

La información del torque ejercido se usa para construir un modelo basado en redes neuronales convolucionales (CNN) que se ilustra en la Figura 2. Este es usado comúnmente para el análisis de imágenes, pero también puede ser empleado con datos de series de tiempo multivariados (Heo et al., 2019). Para este caso, se tienen las mediciones de esfuerzo en cada junta del robot, así como el torque y la fuerza sobre el gripper. El modelo realiza una convolución sobre la entrada y aplica un algoritmo llamado pooling para reducir el tamaño de los datos y disminuir costos computacionales. Este proceso se conoce como extracción de características. El resultado pasa posteriormente a las capas de clasificación, las cuales definen si los datos de entrada corresponden a una anomalía en el proceso (Mishra, 2020).
Figura 2
Estructura del modelo basado en redes neuronales convolucionales

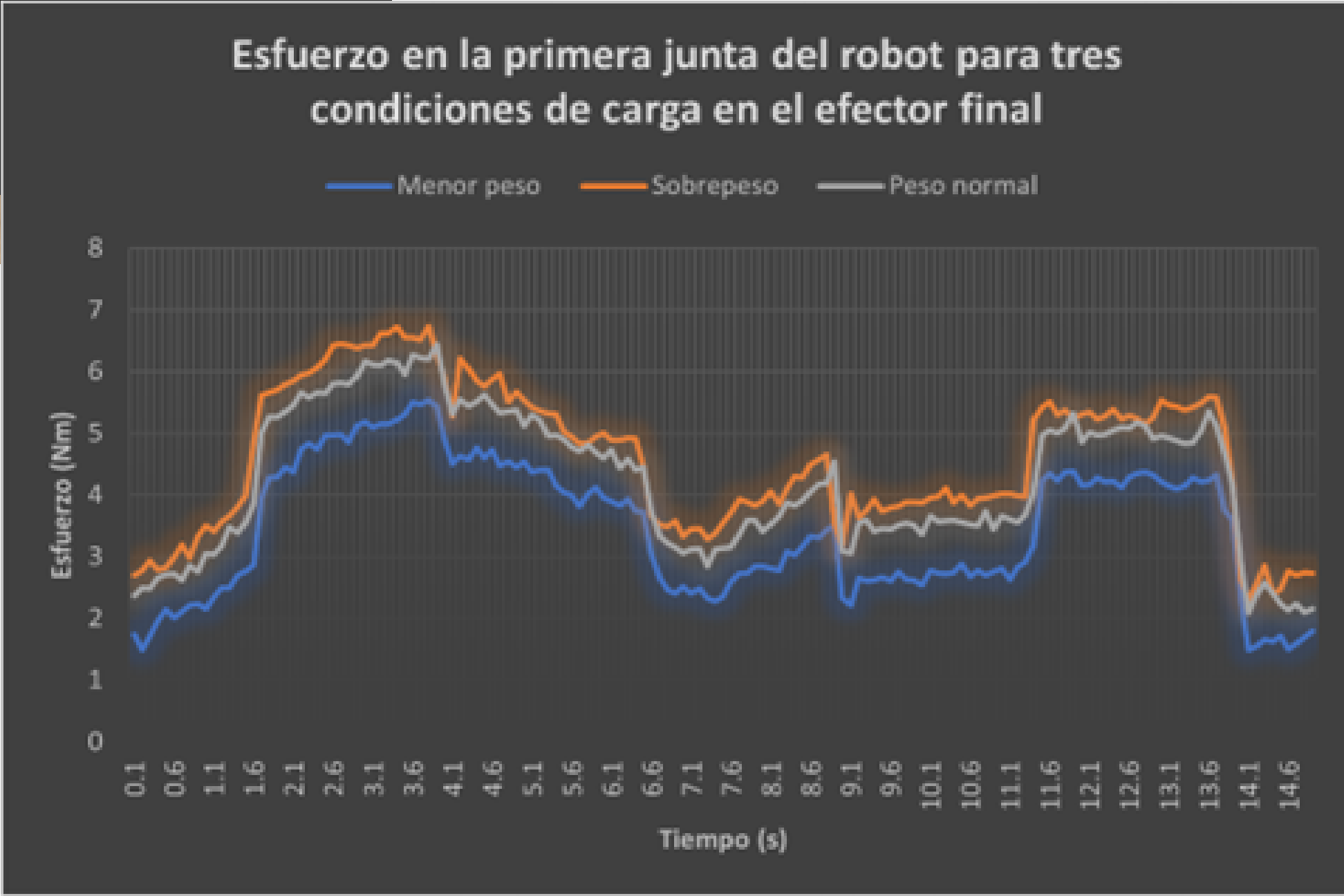
La entrada al modelo de machine learning es un tensor que contiene información de los esfuerzos, torques y fuerzas sobre el robot durante un ciclo de operación. La Figura 3 muestra un ejemplo de serie de tiempo para el esfuerzo en la primera articulación para las tres condiciones de carga mencionadas anteriormente.
Figura 3
Estructura del modelo basado en redes neuronales convolucionales
Una vez construido el modelo, se analizó el desempeño de este obteniendo una pérdida de 6.9% y una precisión del 100%, lo cual puede asegurar la detección de anomalías en la operación.
Estos resultados demuestran la capacidad de la inteligencia artificial para la detección de anomalías en procesos industriales, y desarrollos similares pueden surgir para detectar otro tipo de anomalías como lo son colisiones o reducción de la velocidad en la operación. Asimismo, este proyecto me ha dado la experiencia y motivación para poder aplicar métodos semejantes en los artículos investigativos sobre robótica flexible como parte de mi maestría en la Universidad de Purdue, en los cuales se busca agarrar objetos delicados como algunas frutas, controlando la fuerza aplicada sobre ellos.
Referencias
-
Basic CNN Architecture: Explaining 5 Layers of Convolutional Neural Network. (28 de julio de 2022). UpGrad Blog. https://www.upgrad.com/blog/basic-cnn-architecture/
-
Chen, T., Liu, X., Xia, B., Wang, W., & Lai, Y. (2020). Unsupervised Anomaly Detection of Industrial Robots Using Sliding-Window Convolutional Variational Autoencoder. IEEE Access, 8, 47072–47081. https://doi.org/10.1109/ACCESS.2020.2977892
-
Czubenko, M., & Kowalczuk, Z. (2021). A Simple Neural Network for Collision Detection of Collaborative Robots. Sensors, 21(12), Article 12. https://doi.org/10.3390/s21124235
-
Heo, Y. J., Kim, D., Lee, W., Kim, H., Park, J., & Chung, W. K. (2019). Collision Detection for Industrial Collaborative Robots: A Deep Learning Approach. IEEE Robotics and Automation Letters, 4(2), 740–746. https://doi.org/10.1109/LRA.2019.2893400.
-
Mishra, M. (2020, September 2). Convolutional Neural Networks, Explained. Medium. https://towardsdatascience.com/convolutional-neural-networks-explained-9cc5188c4939
-
Park, K. M., Kim, J., Park, J., & Park, F. C. (2021). Learning-Based Real-Time Detection of Robot Collisions Without Joint Torque Sensors. IEEE Robotics and Automation Letters, 6(1), 103–110. https://doi.org/10.1109/LRA.2020.3033269
SISTEMA DE INFORMACIÓN DE EGRESADOS
En el Sistema de Información de Egresados (SIE) www.egresados.unal.edu.co, podrá consultar ofertas laborales disponibles.
Ingrese con su usuario institucional, consulte la guía de registro o comuniquese con el programa de egresados de su facultad.
PARTICIPE EN LA REVISTA SOY EGRESADO
Si es egresado de la Universidad Nacional de Colombia y desea participar en la revista, escríbanos a This email address is being protected from spambots. You need JavaScript enabled to view it.
VÍNCULOS DE INTERÉS
CRÉDITOS
Dirección de Proyecto:
Elizabeth Moreno Domínguez
Coordinadora Programa de Egresados Sede Bogotá
Dirección Editorial:
Elizabeth Moreno Domínguez
Coordinadora PE Bogotá
Ayda Lizeth Rincón Cañon
Profesional PE Bogotá
Comité Editorial:
Elizabeth Moreno Domínguez
Coordinadora PE Bogotá
Mariana Martínez Berdugo
Coordinadora PE Facultad de Ciencias
Sofía Torres López
Coordinadora PE Facultad de Ciencias Agrarias
María Fernanda Correa Mendivelso
Coordinadora PE Facultad de Artes
Ayda Lizeth Rincón Cañon
Profesional PE Bogotá
Diseño e Implementación:
Luis David Monroy
Estudiante de Diseño Gráfico
Daniel Uchamocha
Estudiante de Diseño Gráfico
Corrección de Estilo:
Sara Daniela Herrera Otálora
Estudiante de Literatura
Programa de Egresados - Sede Bogotá
Unidad Camilo Torres Bloque B8 Oficina 606
Calle. 44 No. 45-67
PBX 3165000 Ext. 10683 - 10667
This email address is being protected from spambots. You need JavaScript enabled to view it.
Las opiniones aquí expresadas, son personales y no representan una posición oficial de la Universidad Nacional de Colombia